Fwd: QUESTION: How can I make a driver for a special serial keyboard which also supports output (maybe via serio_raw)?
From: Néstor Amigo Cairo
Date: Tue May 27 2008 - 13:27:27 EST
---------- Forwarded message ----------
From: Néstor Amigo Cairo <nestorac@xxxxxxxxx>
Date: 2008/5/27
Subject: Re: QUESTION: How can I make a driver for a special serial
keyboard which also supports output (maybe via serio_raw)?
To: Dmitry Torokhov <dmitry.torokhov@xxxxxxxxx>, Linux Kernel Mailing
List <linux-kernel@xxxxxxxxxxxxxxx>
Thanks!! I'm going to do so right now. I send you my current work, as
you can see, I'm adapting an existing driver for this purpose. I would
really appreciate it if you take a look and tell me if I'm doing
right/wrong. I haven't been able to implement write function yet, any
advice would be very helpful also. I'm also sending some schema to
explain me better, but I think you fully understood my ideas.
I hope this time message will arrive also to LKML, everyone's invited
to comment!!
2008/5/27 Dmitry Torokhov <dmitry.torokhov@xxxxxxxxx>:
>
> Hi,
>
> On Sun, May 25, 2008 at 06:52:26PM +0200, N?stor Amigo Cairo wrote:
> > Hello!
> >
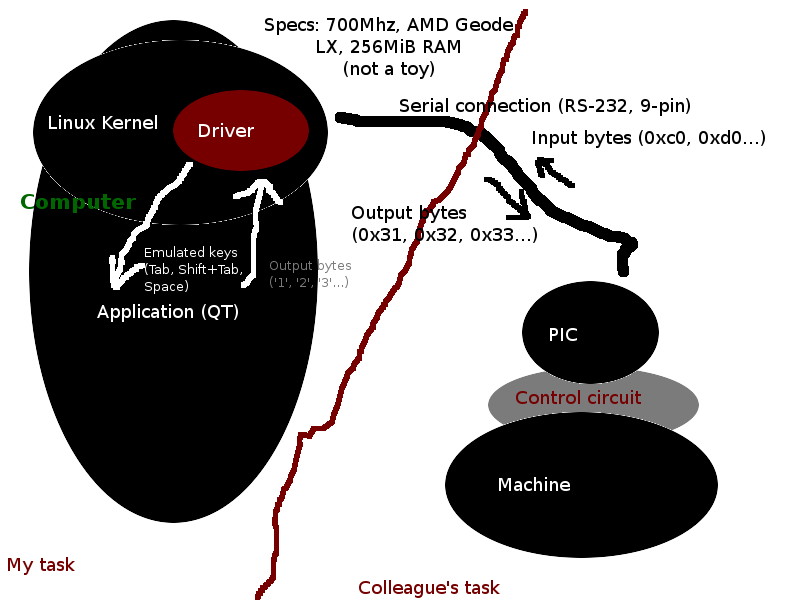
> > I'm trying to make a driver for a special keyboard with just three keys, for
> > an embedded application. This really is a PIC attached to a serial interface
> > which sends some bytes to the computer to manage an application, and then
> > receives some others to control an embedded device using the same cable. So
> > there's a two way connection between them.
> > For now, I have been able to customize the newtonkbd driver to adapt it to
> > receive some bytes and translate them to keys, but I'm not able to send any
> > data. /dev/ttyS0 gets blocked when setting up the driver with a customized
> > version of `inputattach`, an application which ioctl's the serial device to
> > the driver. Write() does not work, since it's not implemented in the driver.
> > Is there any way of implementing access to this device using the same
> > Write() calls as in other apps?
> > Or is there any other way of doing it?? Some documentation??
> >
>
> You would need to implement ->event() handler in your 'keyboard' that
> would call serio->write() on the underlying serio port. Then, by
> opening /dev/input/eventX and writing into it you can send input
> events back to the device.
If the serial device is able to work as a keyboard, and also receive
some data from the application via /dev/input/eventX, that would be
perfect!! That's exactly what I was thinking on.
>
>
> Although I wonder if your device really useable as a generic
> keyboard/button device. You may be better off just using the serial
> port from the userspace.
I have been thinking on it, but it's easier to reimplement some
widgets on Qt for just three keys (I can reuse them easily because of
OOP), than managing focus on every widget communicating the
application directly with the serial port (I've been using a switch
structure for this purpose, which is not very kindly). I saw the
device as a keyboard with just three keys and which can also receive
some bytes from the application. This makes debugging and testing much
easier than dealing directly with the serial interface for changing
the focus and managing the application. The only problem is that a
driver must be written for the device, but my long-term idea is to
write some kind of programmable driver, so it could be reused easily
(by instance, assigning a matrix of values to binary data sent to the
serial port, and converting those bytes into Keys using these values,
as in the original driver, but allowing userspace apps to change this
behaviour). I'm not sure if it would be helpful for anyone else. And I
also lack any knowledge of the kernel internals, as you can see.
>
> --
> Dmitry
--
Néstor Amigo Cairo
+34 687 96 74 81
nestorac@xxxxxxxxx
--
Néstor Amigo Cairo
+34 687 96 74 81
nestorac@xxxxxxxxx
Attachment:
esquema.png
Description: PNG image
/*
* Copyright (c) 2008 Néstor Amigo Cairo, based on
* Copyright (c) 2000 Justin Cormack
*/
/*
* Samko encoder driver for Linux
*/
/*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program; if not, write to the Free Software
* Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA
*
* Should you need to contact me, the author, you can do so by
* e-mail - mail your message to <nestorac@xxxxxxxxx>.
*/
#include <linux/slab.h>
#include <linux/module.h>
#include <linux/input.h>
#include <linux/init.h>
#include <linux/serio.h>
#define DRIVER_DESC "Samko Serial Encoder controller device input driver"
MODULE_AUTHOR("Néstor Amigo Cairo <nestorac@xxxxxxxxx>");
MODULE_DESCRIPTION(DRIVER_DESC);
MODULE_LICENSE("GPL");
#define SERIO_SAM 0x36
#define BIT_MASK(nr) (1UL << ((nr) % BITS_PER_LONG))
static unsigned char nkbd_keycode[256] = {
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
1, 1, 1, 1, 1, 1
};
struct nkbd {
unsigned char keycode[256];
struct input_dev *dev;
struct serio *serio;
char phys[32];
};
static irqreturn_t nkbd_interrupt(struct serio *serio,
unsigned char data, unsigned int flags)
{
struct nkbd *nkbd = serio_get_drvdata(serio);
/* invalid scan codes are probably the init sequence, so we ignore them */
//if (nkbd->keycode[data]) {
if ((int)data == 217) // Then, left key is pressed
{
input_report_key(nkbd->dev, KEY_LEFTSHIFT, 1);
input_report_key(nkbd->dev, KEY_TAB, 1);
input_report_key(nkbd->dev, KEY_TAB, 0);
input_report_key(nkbd->dev, KEY_LEFTSHIFT, 0);
input_sync(nkbd->dev);
printk(KERN_INFO "Samko's Left Key: 96\n");
}
else if ((int)data == 200) // Then, center key is pressed
{
input_report_key(nkbd->dev, KEY_A, 1);
input_report_key(nkbd->dev, KEY_A, 0);
input_sync(nkbd->dev);
printk(KERN_INFO "Samko's Center Key: 32\n");
}
else if ((int)data == 208) // Then, right key is pressed
{
input_report_key(nkbd->dev, KEY_TAB, 1);
input_report_key(nkbd->dev, KEY_TAB, 0);
input_sync(nkbd->dev);
printk(KERN_INFO "Samko's Right Key: 80\n");
}
else
{
printk(KERN_INFO "Samko's Key pressed: %i\n",(int)data);
}
//}
//else if (data == 0xe7) /* end of init sequence */
// printk(KERN_INFO "input: %s on %s\n", nkbd->dev->name, serio->phys);
//else
//{
// printk(KERN_INFO "Samko's Key pressed (other situation): %i\n",(int)data);
//}
return IRQ_HANDLED;
}
static int nkbd_connect(struct serio *serio, struct serio_driver *drv)
{
struct nkbd *nkbd;
struct input_dev *input_dev;
int err = -ENOMEM;
int i;
nkbd = kzalloc(sizeof(struct nkbd), GFP_KERNEL);
input_dev = input_allocate_device();
if (!nkbd || !input_dev)
goto fail1;
nkbd->serio = serio;
nkbd->dev = input_dev;
snprintf(nkbd->phys, sizeof(nkbd->phys), "%s/input0", serio->phys);
memcpy(nkbd->keycode, nkbd_keycode, sizeof(nkbd->keycode));
input_dev->name = "Samko Serial Encoder Device";
input_dev->phys = nkbd->phys;
input_dev->id.bustype = BUS_RS232;
input_dev->id.vendor = SERIO_SAM;
input_dev->id.product = 0x0001;
input_dev->id.version = 0x0100;
input_dev->dev.parent = &serio->dev;
input_dev->evbit[0] = BIT_MASK(EV_KEY);
input_dev->keycode = nkbd->keycode;
input_dev->keycodesize = sizeof(unsigned char);
input_dev->keycodemax = sizeof(nkbd_keycode);
for (i = 0; i < 255; i++)
set_bit(nkbd->keycode[i], input_dev->keybit);
clear_bit(0, input_dev->keybit);
serio_set_drvdata(serio, nkbd);
err = serio_open(serio, drv);
if (err)
goto fail2;
err = input_register_device(nkbd->dev);
if (err)
goto fail3;
return 0;
fail3: serio_close(serio);
fail2: serio_set_drvdata(serio, NULL);
fail1: input_free_device(input_dev);
kfree(nkbd);
return err;
}
static void nkbd_disconnect(struct serio *serio)
{
struct nkbd *nkbd = serio_get_drvdata(serio);
serio_close(serio);
serio_set_drvdata(serio, NULL);
input_unregister_device(nkbd->dev);
kfree(nkbd);
}
static struct serio_device_id nkbd_serio_ids[] = {
{
.type = SERIO_RS232,
.proto = SERIO_SAM,
.id = SERIO_ANY,
.extra = SERIO_ANY,
},
{ 0 }
};
MODULE_DEVICE_TABLE(serio, nkbd_serio_ids);
static struct serio_driver nkbd_drv = {
.driver = {
.name = "serenc",
},
.description = DRIVER_DESC,
.id_table = nkbd_serio_ids,
.interrupt = nkbd_interrupt,
.connect = nkbd_connect,
.disconnect = nkbd_disconnect,
//.write = tty_write,
};
static int __init nkbd_init(void)
{
return serio_register_driver(&nkbd_drv);
}
static void __exit nkbd_exit(void)
{
serio_unregister_driver(&nkbd_drv);
}
module_init(nkbd_init);
module_exit(nkbd_exit);
Attachment:
Makefile
Description: Binary data
/*
* $Id: inputattach.c,v 1.8 2000/07/17 10:42:15 vojtech Exp $
*
* Copyright (c) 1999-2000 Vojtech Pavlik
*
* Sponsored by SuSE
*/
/*
* Input line discipline attach program
*/
/*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program; if not, write to the Free Software
* Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA
*
* Should you need to contact me, the author, you can do so either by
* e-mail - mail your message to <vojtech@xxxxxx>, or by paper mail:
* Vojtech Pavlik, Ucitelska 1576, Prague 8, 182 00 Czech Republic
*/
#include <linux/serio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/ioctl.h>
#include <sys/time.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <fcntl.h>
#include <termios.h>
#include <string.h>
#include <pthread.h>
/* do not init for arm at the moment */
#define NOINIT
#define SERIO_SAM 0x36
struct t_params
{
int fd, ldisc;
};
void* ioctl_thread(void* param_)
{
struct t_params* p = (struct t_params*) param_;
if(ioctl(p->fd, TIOCSETD, &p->ldisc))
{
fprintf(stderr, "inputattach: can't set line discipline\n");
//return 1;
}
read(p->fd, NULL, 0);
}
int readchar(int fd, unsigned char *c, int timeout)
{
struct timeval tv;
fd_set set;
tv.tv_sec = 0;
tv.tv_usec = timeout * 1000;
FD_ZERO(&set);
FD_SET(fd, &set);
if (!select(fd+1, &set, NULL, NULL, &tv)) return -1;
read(fd, c, 1);
return 0;
}
void setline(int fd, int flags, int speed)
{
struct termios t;
tcgetattr(fd, &t);
t.c_cflag = flags | CREAD | HUPCL | CLOCAL;
t.c_iflag = IGNBRK | IGNPAR;
t.c_oflag = 0;
t.c_lflag = 0;
t.c_cc[VMIN ] = 1;
t.c_cc[VTIME] = 0;
cfsetispeed(&t, speed);
cfsetospeed(&t, speed);
tcsetattr(fd, TCSANOW, &t);
}
int logitech_command(int fd, char *c)
{
int i;
unsigned char d;
for (i = 0; c[i]; i++) {
write(fd, c + i, 1);
if (readchar(fd, &d, 1000))
return -1;
if (c[i] != d)
return -1;
}
return 0;
}
int magellan_init(int fd)
{
write(fd, "m3\rpBB\rz\r", 9);
return 0;
}
int samko_init(int fd)
{
printf ("Init!!\n");
if ( (write(fd, "m3\rpBB\rz\r", 9)) < 0)
{
return -1;
}
printf ("Initiated!!\n");
return 0;
}
int warrior_init(int fd)
{
if (logitech_command(fd, "*S")) return -1;
setline(fd, CS8, B4800);
return 0;
}
int spaceball_init(int fd)
{
unsigned char c;
if (readchar(fd, &c, 4000) || c != 0x11 ||
readchar(fd, &c, 1000) || c != 0x0d)
return -1;
sleep(2); /* Wait a few seconds for the Spaceball to initialize. */
if (write(fd,"YS\rM\r", 5) != 5) /* Set linear sensitivity & enable axis events */
return -1;
return 0;
}
int stinger_init(int fd)
{
int i;
unsigned char c;
unsigned char *response = "\r\n0600520058C272";
if (write(fd, " E5E5", 5) != 5) /* Enable command */
return -1;
for (i = 0; i < 16; i++) /* Check for Stinger */
if (readchar(fd, &c, 200) || (c != response[i]))
return -1;
return 0;
}
int mzp_init(int fd)
{
if (logitech_command(fd, "*X*q")) return -1;
setline(fd, CS8, B9600);
return 0;
}
int newton_init(int fd)
{
int i;
unsigned char c;
unsigned char response[35] =
{ 0x16, 0x10, 0x02, 0x64, 0x5f, 0x69, 0x64, 0x00,
0x00, 0x00, 0x0c, 0x6b, 0x79, 0x62, 0x64, 0x61,
0x70, 0x70, 0x6c, 0x00, 0x00, 0x00, 0x01, 0x6e,
0x6f, 0x66, 0x6d, 0x00, 0x00, 0x00, 0x00, 0x10,
0x03, 0xdd, 0xe7 };
for (i = 0; i < 35; i++)
if (readchar(fd, &c, 400) || (c != response[i]))
return -1;
return 0;
}
int dump_init(int fd)
{
unsigned char c, o = 0;
while (1)
if (!readchar(fd, &c, 1)) {
printf("%02x (%c) ", c, ((c > 32) && (c < 127)) ? c : 'x');
o = 1;
} else {
if (o) {
printf("\n");
o = 0;
}
}
}
struct input_types {
char name[16];
char name2[16];
int speed;
int flags;
unsigned long type;
unsigned long extra;
int flush;
int (*init)(int fd);
};
struct input_types input_types[] = {
{ "--sunkbd", "-skb", B1200, CS8, SERIO_SUNKBD, 0x00, 1, NULL },
{ "--spaceorb", "-orb", B9600, CS8, SERIO_SPACEORB, 0x00, 1, NULL },
{ "--spaceball", "-sbl", B9600, CS8, SERIO_SPACEBALL,0x00, 1, spaceball_init },
{ "--magellan", "-mag", B9600, CS8 | CSTOPB | CRTSCTS, SERIO_MAGELLAN, 0x00, 1, magellan_init },
{ "--warrior", "-war", B1200, CS7 | CSTOPB, SERIO_WARRIOR, 0x00, 1, warrior_init },
/*{ "--stinger", "-sting", B1200, CS8, SERIO_STINGER, 0x00, 1, stinger_init },*/
{ "--stinger", "-sting", B1200, CS8, SERIO_WARRIOR, 0x00, 1, stinger_init },
{ "--mousesystems", "-msc", B1200, CS8, SERIO_MSC, 0x01, 1, NULL },
{ "--sunmouse", "-sun", B1200, CS8, SERIO_SUN, 0x01, 1, NULL },
{ "--microsoft", "-bare", B1200, CS7, SERIO_MS, 0x00, 1, NULL },
{ "--mshack", "-ms", B1200, CS7, SERIO_MS, 0x01, 1, NULL },
{ "--mouseman", "-mman", B1200, CS7, SERIO_MP, 0x01, 1, NULL },
{ "--intellimouse", "-ms3", B1200, CS7, SERIO_MZ, 0x11, 1, NULL },
{ "--mmwheel", "-mmw", B1200, CS7 | CSTOPB, SERIO_MZP, 0x13, 1, mzp_init },
{ "--iforce", "-ifor", B38400, CS8 | CRTSCTS, SERIO_IFORCE, 0x00, 0, NULL },
{ "--newtonkbd", "-newt", B9600, CS8, SERIO_NEWTON, 0x00, 0, newton_init },
{ "--samkoenc", "-sam", B9600, CS8, SERIO_SAM, 0x00, 0, samko_init},
{ "--stowaway", "-stow", B9600, CS8, SERIO_STOWAWAY,0x00, 0, NULL },
{ "--dump", "-dump", B1200, CS7, 0, 0x00, 0, dump_init },
{ "", "", 0, 0 }
};
int main(int argc, char **argv)
{
unsigned long devt;
struct t_params param;
int type, i;
char c;
int pfds[2];
char buf[30];
pthread_t thread_id;
if (argc < 2 || argc > 3 || !strcmp("--help", argv[1])) {
puts("");
puts("Usage: inputttach <mode> <device>");
puts("");
puts("Modes:");
puts(" --sunkbd -skb Sun Type 4 and Type 5 keyboards");
puts(" --spaceorb -orb SpaceOrb 360 / SpaceBall Avenger");
puts(" --spaceball -sbl SpaceBall 2003 / 3003 / 4000 FLX");
puts(" --magellan -mag Magellan / SpaceMouse");
puts(" --warrior -war WingMan Warrior");
puts(" --stinger -stng Gravis Stinger");
puts(" --mousesystems -msc 3-button Mouse Systems mice");
puts(" --sunmouse -sun 3-button Sun mice");
puts(" --microsoft -bare 2-button Microsoft mice");
puts(" --mshack -ms 3-button mice in Microsoft mode");
puts(" --mouseman -mman 3-button Logitech and Genius mice");
puts(" --intellimouse -ms3 Microsoft IntelliMouse");
puts(" --mmwheel -mmw Logitech mice with 4-5 buttons or wheel");
puts(" --iforce -ifor I-Force joysticks and wheels");
puts(" --newtonkbd -newt Apple Newton keyboard");
puts(" --stowaway -stow Stowaway PDA keyboard");
puts(" --samkoenc -sam Samko Serial Encoder");
puts("");
return 1;
}
for (type = 0; input_types[type].speed; type++) {
if (!strncasecmp(argv[1], input_types[type].name, 16) ||
!strncasecmp(argv[1], input_types[type].name2, 16))
break;
}
if (!input_types[type].speed) {
fprintf(stderr, "inputattach: invalid mode\n");
return 1;
}
if ((param.fd = open(argv[2], O_RDWR | O_NOCTTY | O_NDELAY)) < 0) {
perror("inputattach");
return 1;
}
setline(param.fd, input_types[type].flags, input_types[type].speed);
if (input_types[type].flush)
while (!readchar(param.fd, &c, 100));
#ifndef NOINIT
if (input_types[type].init && input_types[type].init(param.fd)) {
fprintf(stderr, "inputattach: device initialization failed\n");
return 1;
}
#endif
param.ldisc = N_MOUSE;
//param.ldisc = N_TTY;
if(ioctl(param.fd, TIOCSETD, ¶m.ldisc)) {
fprintf(stderr, "inputattach: can't set line discipline\n");
return 1;
}
devt = SERIO_RS232 | input_types[type].type | (input_types[type].extra << 16);
printf ("Uno.\n");
if(ioctl(param.fd, SPIOCSTYPE, &devt)) {
fprintf(stderr, "inputattach: can't set device type\n");
return 1;
}
/*
if(ioctl(param.fd, TIOCSETD, ¶m.ldisc))
{
fprintf(stderr, "inputattach: can't set line discipline\n");
return 1;
}
read(param.fd, NULL, 0);
*/
pthread_create (&thread_id, NULL, &ioctl_thread, ¶m);
while (1)
{
tty_write(param.fd, "A", 1);
//printf ("A ");
usleep(10000);
}
printf("\n");
printf("Well done,\n");
sleep (100);
printf("Cutty Shark.\n");
param.ldisc = 0;
ioctl(param.fd, TIOCSETD, ¶m.ldisc);
close(param.fd);
return 0;
}
{kind=link}